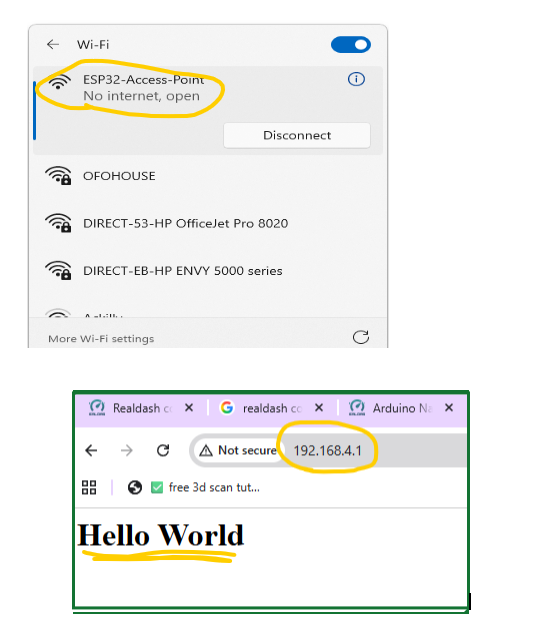
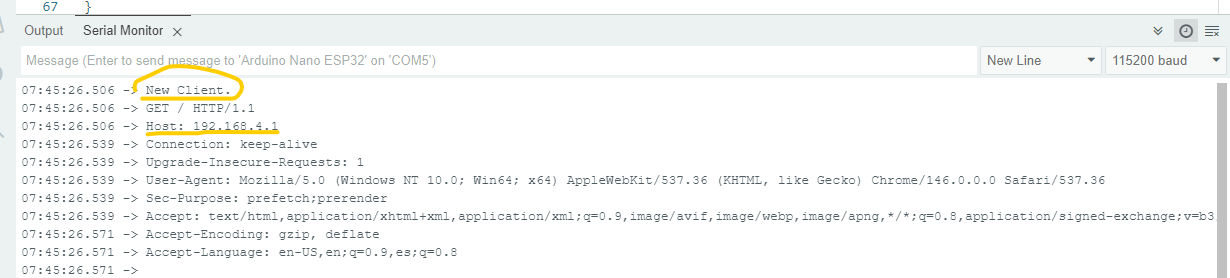
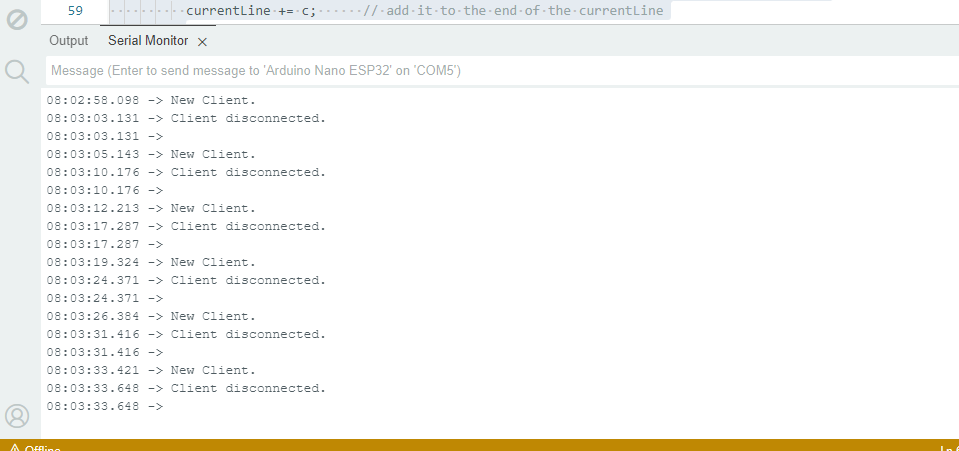
Alright, I tried this new code based on the RealDash CAN arduino Example, massage it a little bit to fit my application…basically I replaced Serial.write for server.write use the example XML file
still can’t connect. Below the Arduino sketch
#include <WiFi.h> // WiFi Library
const char* ssid = “300ZX-ESP”; // Network Name
WiFiServer server(80); // Set web server port number to 80, make sure RD matches
// Arduino digital and analog pins
unsigned int digitalPins = 0;
int analogPins[7] = {0};
unsigned int rpm = 0;
unsigned int kpa = 992; // 99.2
unsigned int tps = 965; // 96.5
unsigned int clt = 80; // 80 - 100
unsigned int textCounter = 0;
void setup()
{
Serial.begin(115200); // This baud rate most likely will change when connected to RealDash
WiFi.mode(WIFI_AP); // Set WiFi to Access Point mode
WiFi.softAP(ssid, NULL); // Start the softAP without a password (second argument is NULL)
//delay(1500);
while (!Serial){} // Wait for the Serial Port to be available, then continue with the set up
Serial.print(“AP Created with SSID: " + String(ssid));
Serial.println(” NO PASSWORD REQUIRED");
Serial.print("IP Address: ");
Serial.println(WiFi.softAPIP()); // Typically 192.168.4.1
}
void loop()
{
server.begin();
Dummy_Values(); // Call Subroutine to simulate some values
ReadDigitalStatuses(); // Call Subroutine to read digital values pins 1-13
ReadAnalogStatuses(); // Call Subroutine to read analog values pins A0-A7
SendCANFramesToWiFi(); // Call Subroutine to send CAN data via WiFi
}
//Subroutines
void Dummy_Values()
{
// just some dummy values for simulated engine parameters
if (rpm++ > 10000)
{
rpm = 500;
}
if (kpa++ > 2500)
{
kpa = 10;
}
if (tps++ > 1000)
{
tps = 0;
}
if (clt++ > 230)
{
// all values in frame are handled as unsigned values. To have negative values,
// offset actual value and write corresponding conversion to xml file imported to RealDash
clt = 0;
}
if (textCounter++ > 4000)
{
textCounter = 0;
}
delay(5);
}
void ReadDigitalStatuses()
{
// read status of digital pins (1-13)
digitalPins = 0;
int bitposition = 0;
for (int i=1; i<14; i++)
{
if (digitalRead(i) == HIGH) digitalPins |= (1 << bitposition);
bitposition++;
}
}
void ReadAnalogStatuses()
{
// read analog pins (0-7)
for (int i=0; i<7; i++)
{
analogPins[i] = analogRead(i);
}
}
void SendCANFramesToWiFi()
{
byte buf[8];
// build & send CAN frames to RealDash.
// a CAN frame payload is always 8 bytes containing data in a manner
// described by the RealDash custom channel description XML file
// all multibyte values are handled as little endian by default.
// endianess of the values can be specified in XML file if it is required to use big endian values
// build 1st CAN frame, RPM, MAP, CLT, TPS (just example data)
memcpy(buf, &rpm, 2);
memcpy(buf + 2, &kpa, 2);
memcpy(buf + 4, &clt, 2);
memcpy(buf + 6, &tps, 2);
// write first CAN frame to serial
SendCANFrameToWiFi(3200, buf);
// build 2nd CAN frame, Arduino digital pins and 2 analog values
memcpy(buf, &digitalPins, 2);
memcpy(buf + 2, &analogPins[0], 2);
memcpy(buf + 4, &analogPins[1], 2);
memcpy(buf + 6, &analogPins[2], 2);
// write 2nd CAN frame to serial
SendCANFrameToWiFi(3201, buf);
// build 3rd CAN frame, rest of Arduino analog values
memcpy(buf, &analogPins[3], 2);
memcpy(buf + 2, &analogPins[4], 2);
memcpy(buf + 4, &analogPins[5], 2);
memcpy(buf + 6, &analogPins[6], 2);
// write 3rd CAN frame to serial
SendCANFrameToWiFi(3202, buf);
// build 4th frame, this is a text extension frame
// only send once at 1000 loops
if (textCounter == 0)
{
SendTextExtensionFrameToWiFi(3203, “Hello RealDash, this is Arduino sending some text data”);
}
else if (textCounter == 1000)
{
SendTextExtensionFrameToWiFi(3203, “Tomorrow’s forecast: Lots of sun and 30 degrees centigate”);
}
else if (textCounter == 2000)
{
SendTextExtensionFrameToWiFi(3203, “Now Playing: Insert your favorite song info here”);
}
else if (textCounter == 3000)
{
SendTextExtensionFrameToWiFi(3203, “Message from Arduino: All systems running at nominal efficiency”);
}
}
void SendCANFrameToWiFi(unsigned long canFrameId, const byte* frameData)
{
// the 4 byte identifier at the beginning of each CAN frame
// this is required for RealDash to ‘catch-up’ on ongoing stream of CAN frames
const byte serialBlockTag[4] = { 0x44, 0x33, 0x22, 0x11 };
server.write(serialBlockTag, 4);
// the CAN frame id number (as 32bit little endian value)
server.write((const byte*)&canFrameId, 4);
// CAN frame payload
server.write(frameData, 8);
}
void SendTextExtensionFrameToWiFi(unsigned long canFrameId, const char* text)
{
if (text)
{
// the 4 byte identifier at the beginning of each CAN frame
// this is required for RealDash to ‘catch-up’ on ongoing stream of CAN frames
const byte textExtensionBlockTag[4] = { 0x55, 0x33, 0x22, 0x11 };
server.write(textExtensionBlockTag, 4);
// the CAN frame id number (as 32bit little endian value)
server.write((const byte*)&canFrameId, 4);
// text payload
server.write(text, strlen(text) + 1);
}
}