How do I get a CAN AN output to hold its value until a change is requested?
So my plan is to have an adjustable launch rpm slider.
I’ve chosen AC SET TEMP as the output, this is correctly configured in my link ECU and the value changes perfectly but after a short period of time the value at the ECU drops to 0 again.
Because you change the value in one cycle by sending one command, but you need to send it always. Then the ecu will always see your value.
And how do I do that?
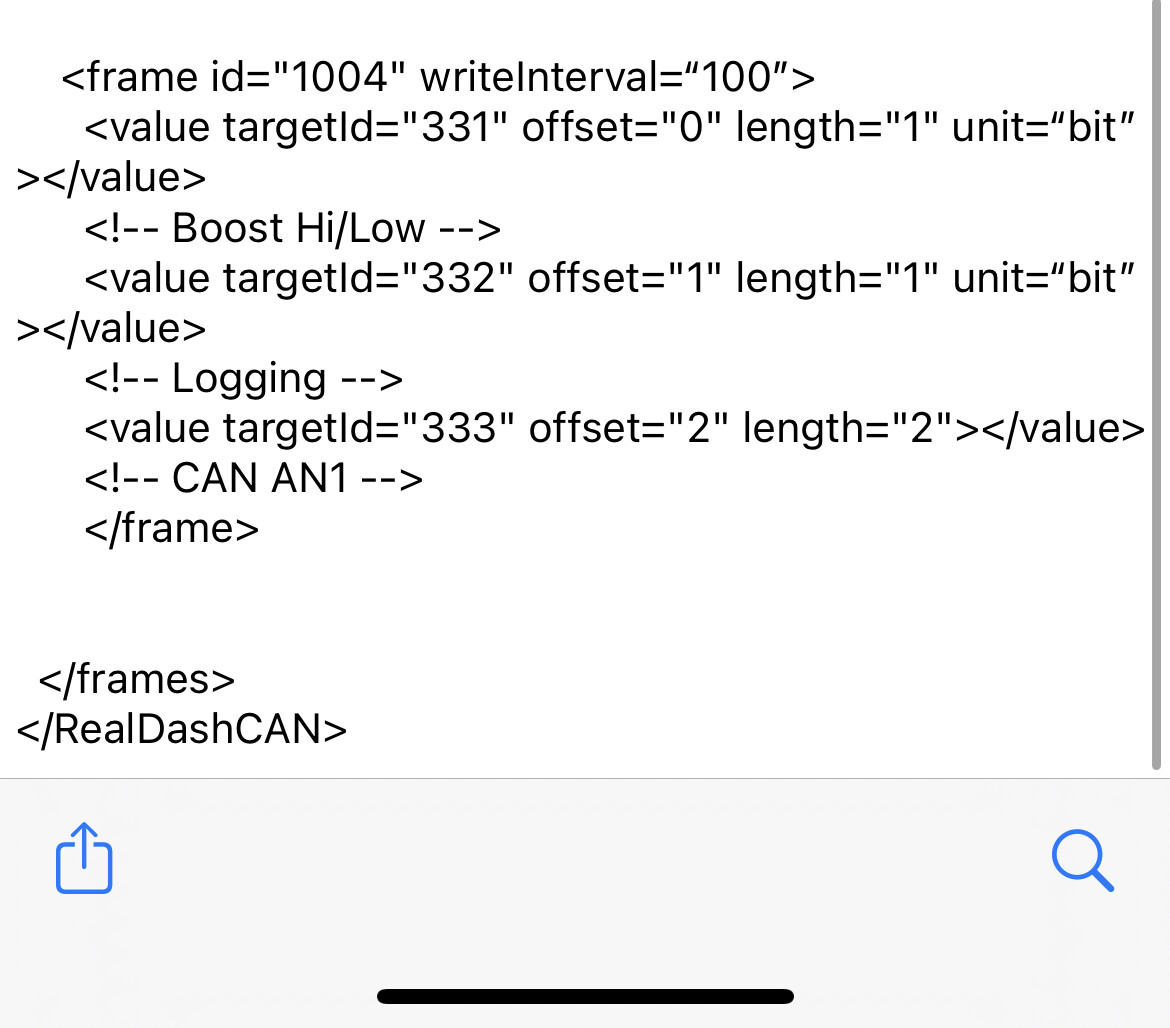
You can use the ‘writeInterval’ attribute in CAN XML. See documentation here:
https://github.com/janimm/RealDash-extras/tree/master/RealDash-CAN
That doesn’t work unfortunately.
It actually makes the can di switches behave weird too if I add the writeinterval into the xml even though their not on the same id.
Scratch that, found an error in my xml, all sorted