Hello
Im working on a project for my old car , i use a linux Realdash v241 on SBC (OrangePi Zero 2W), the SBC should capture the OBD2 data from the ECU (doesnt support CAN) and translate it to CAN frames and send it to realdash over socketcan (virtual CAN interface)
i successfully can receive the classic CAN frames on the realdash monitor but when i enable the CAN FD frames in my script (im using python-CAN) the realdash cant receive any frames although i can see the FD frames received on candump terminal window, attached are frames captured on wireshark , only length is the difference between them, the short one i can receive on realdash the other not
any suggestions?
note: im not using OBD2 direct on realdash because the project include many other things will be added to the car and i need CAN interface for them
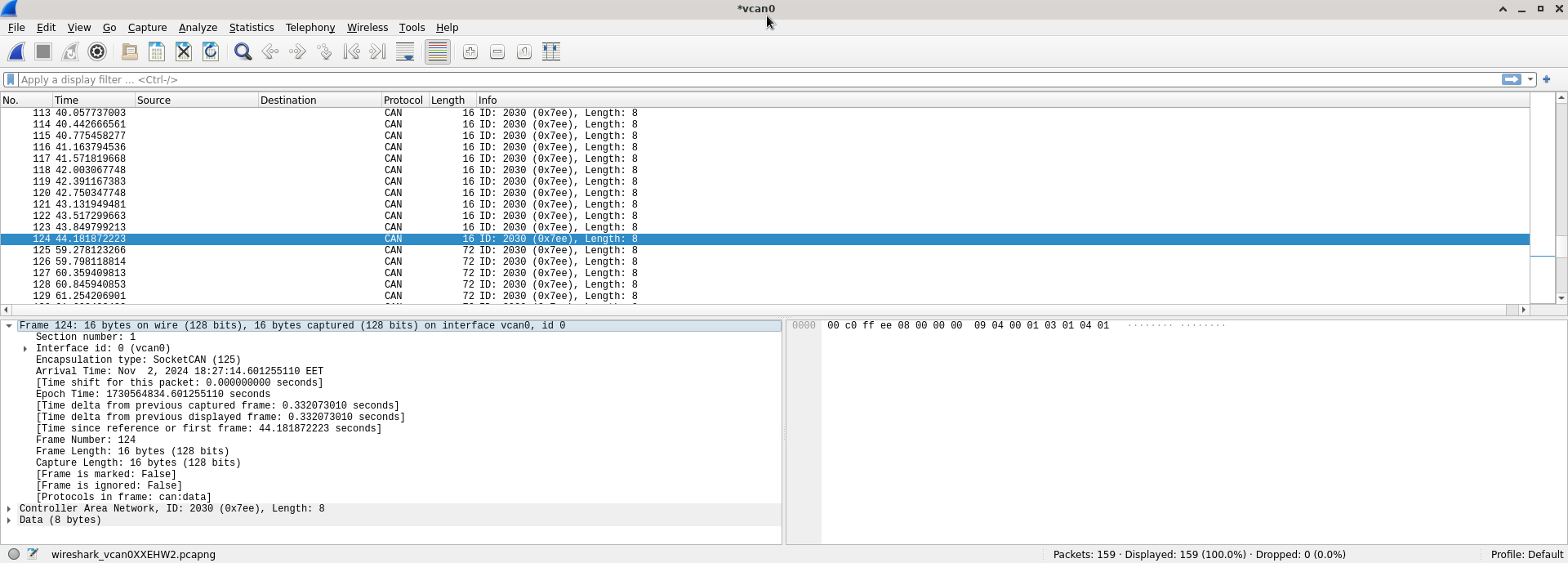
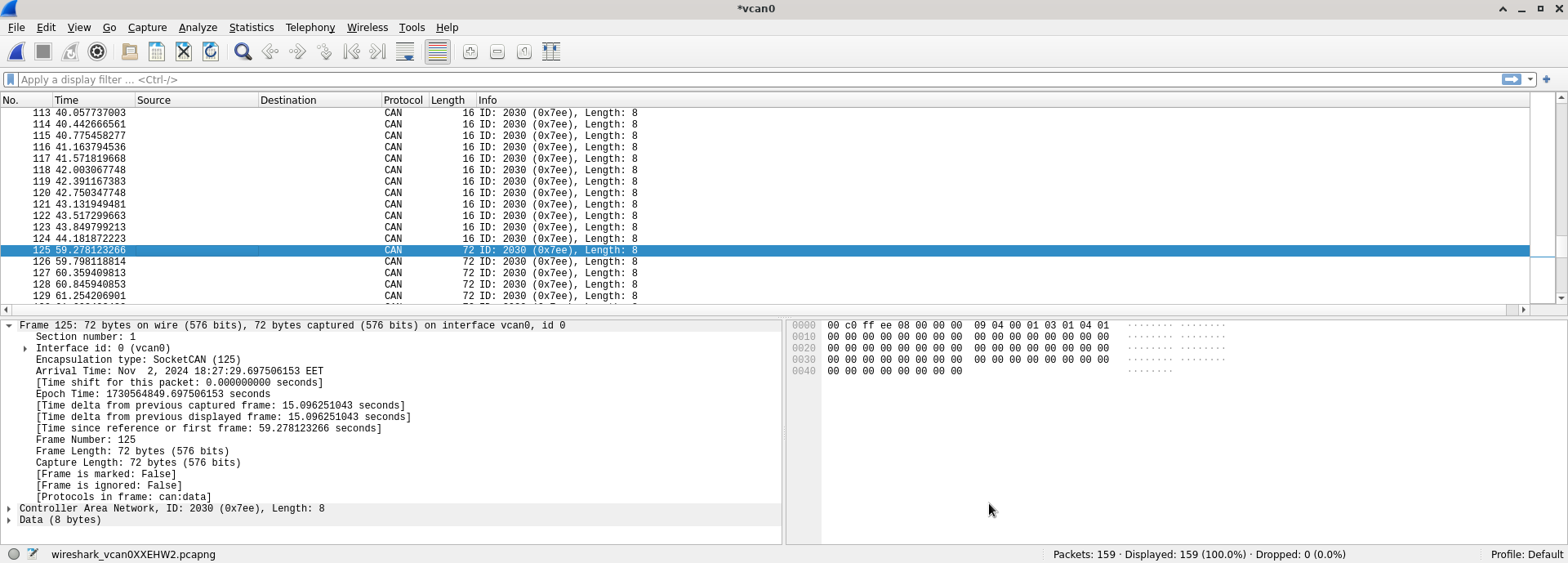
I will try to check this. I don’t have any ‘real’ devices that send CAN FD frames to test on, but wireshark screenshot may be helpful.