It appears that the ECUMaster GPS to CAN with IMU module is configurable via their software. I skimmed thru the manual and only found some vague data. I know the module is pricey but I need it for the position update frequency 25Hz and IMU update frequency 200 HZ for drag racing, Looking at RD Target IDs confused as to the acceleration data. ECUMaster calls it X,Y,Z angular rate and X,Y,Z Acceleration. RD Target IDs list X,Y,Z Acceleration and X,Y,Z Acceleration Raw. Not for sure if the definitions are the same.
If the Acceleration values are correct for the Target IDs could I then just use the Angular Rate in the Dummy Target IDs so that I can log those as well?
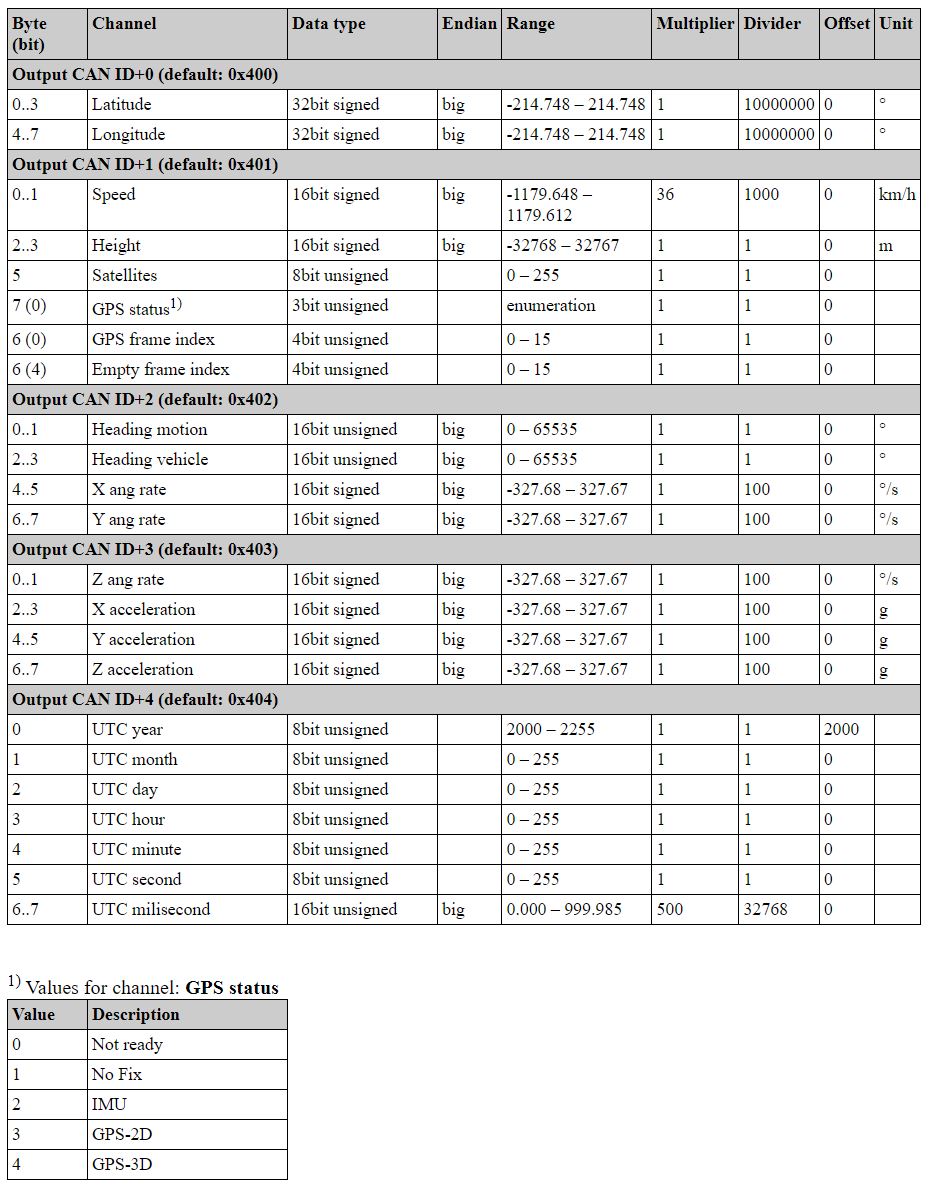
Here is a sample of the format output:
Byte (bit) Channel Data type Range Multiplier Divider Offset Unit
Ecumaster output ID (default: 0x400)
0 Latitude 32bit signed -90 – 90 1 107 0 °
4 Longitude 32bit signed -180 – 180 1 107 0 °
Ecumaster output ID+1 (default: 0x401)
0 Speed 16bit signed -1179 – 1179 36 1000 0 km/h
2 Height 16bit signed -32768 – 32767 1 1 0 m
5 Satellites number 8bit unsigned 0 – 72 1 1 0 -
6 (0) GPS frame index 4bit unsigned 0 – 16 1 1 0 -
6 (4) Empty frame index 4bit unsigned 0 – 16 1 1 0 -
7 (0) GPS status 3bit unsigned 1 – 5 1 1 0 -
Ecumaster output ID+2 (default: 0x402)
0 Heading motion 16bit unsigned 0 – 360 1 1 0 °
2 Heading vehicle 16bit unsigned 0 – 360 1 1 0 °
4 X angle rate 16bit signed -250 – 250 1 100 0 °/s
6 Y angle rate 16bit signed -250 – 250 1 100 0 °/s
Ecumaster output ID+3 (default: 0x403)
0 Z angle rate 16bit signed -250 – 250 1 100 0 °/s
2 X acceleration 16bit signed -4 – 4 1 100 0 g
4 Y acceleration 16bit signed -4 – 4 1 100 0 g
6 Z acceleration 16bit signed -4 – 4 1 100 0 g
Channels description:
Latitude – latitude position in degrees
Longitude – longitude position in degrees
Speed – ground speed in kilometers per hour
Height – height above mean sea level in meters
Satellites number – number of currently visible satellites
GPS frame index – increments cyclically from 0 to 15 for each position frame
Empty frame index – increments cyclically from 0 to 15 for each empty frame
GPS status – position fix status:
• 1 - “NoFix” - no position fix acquired
• 3 - “GPS-2D” - position is fixed in 2D space using GNSS satellites
• 4 - “GPS-3D” - position is fixed in 3D space using GNSS satellites
Heading motion – direction of vehicle motion in degrees
Heading vehicle – direction in which vehicle front is heading in degrees
X, Y, Z angle rate – angular velocity around longitudinal, lateral and vertical axis (referenced
to the vehicle frame)
X, Y, Z acceleration – longitudinal, lateral and vertical acceleration (referenced to the vehicle
frame)
UTC year, month, day – UTC date from navigation satellites
UTC hour, minute, second, millisecond – UTC time from navigation satellites