Hello everyone,
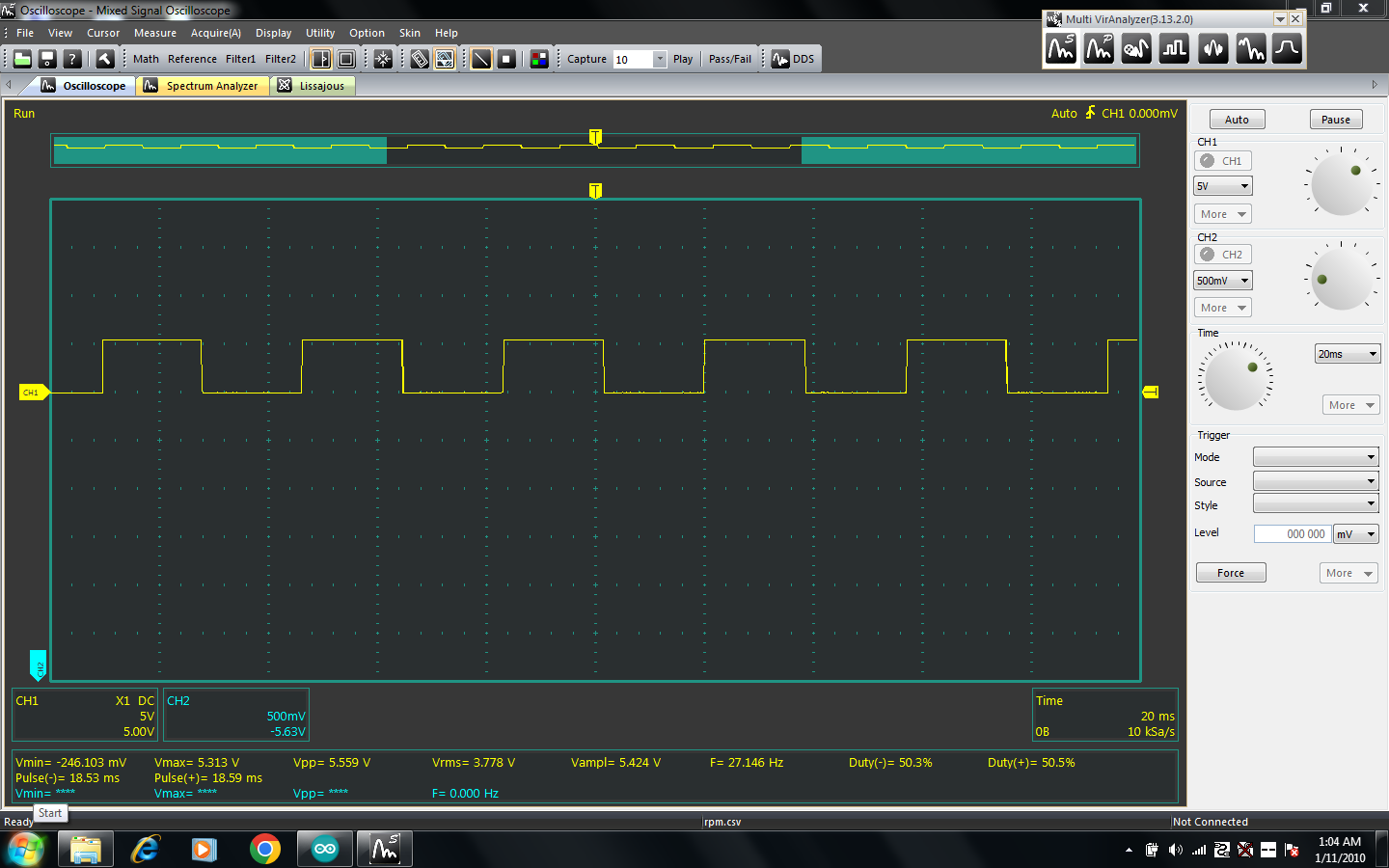
Im working on a real dash project. however its a toyota corolla with 4efe engine with NO CAN BUS communication . my attempt is to digital read the ecu generated RPM signal and then to feed the data to read dash via serial com. I scoped the ecu RPM signal and figured out it had duty of 50% and has a frequency around 28 at idle . with some basic coding i was able to get the rpm respnsive to throtle . how ever the RPM needle fluctuctaes all times even at idle and sometimes get frozen and also sometimes it lagy . i will attach my code and the ecu scoped rpm signal at idle. appriciate your help and support
// input pin can be any digital input
unsigned long inputPin = 3;
boolean inputState = false;
boolean lastInputState = false;
unsigned long count = 0L;
unsigned long rpm = 0;
unsigned long previousCountMillis = millis();
const long countMillis = 500L;
void setInputState() {
inputState = digitalRead(inputPin);
}
void setup() {
pinMode(inputPin, INPUT);
Serial.begin(115200);
}
void loop() {
SendCANFramesToSerial();
rpm = count*60;
// runs every time thru the loop
setInputState();
// count every transision HIGH<->LOW
if (inputState != lastInputState) {
count++;
lastInputState = inputState;
}
// ------- every half second, count is equal to Hz.---------------
if (millis() - previousCountMillis >= countMillis) {
previousCountMillis += countMillis;
// show Hz on Serial too if available
// Serial.print(count);
// Serial.println(" Hz");
// reset to zero for the next half second's sample
count = 0L;
// Serial.print(rpm);
// Serial.println(" RPM");
}
}
void SendCANFramesToSerial()
{
byte buf[8];
// build & send CAN frames to RealDash.
// a CAN frame payload is always 8 bytes containing data in a manner
// described by the RealDash custom channel description XML file
// all multibyte values are handled as little endian by default.
// endianess of the values can be specified in XML file if it is required to use big endian values
// build 1st CAN frame, RPM, MAP, CLT, TPS (just example data)
memcpy(buf, &rpm, 2);
// write first CAN frame to serial
SendCANFrameToSerial(3200, buf);
}
void SendCANFrameToSerial(unsigned long canFrameId, const byte* frameData)
{
// the 4 byte identifier at the beginning of each CAN frame
// this is required for RealDash to 'catch-up' on ongoing stream of CAN frames
const byte serialBlockTag[4] = { 0x44, 0x33, 0x22, 0x11 };
Serial.write(serialBlockTag, 4);
// the CAN frame id number (as 32bit little endian value)
Serial.write((const byte*)&canFrameId, 4);
// CAN frame payload
Serial.write(frameData, 8);
}
Iam not reving . it just fluctuates