Hi
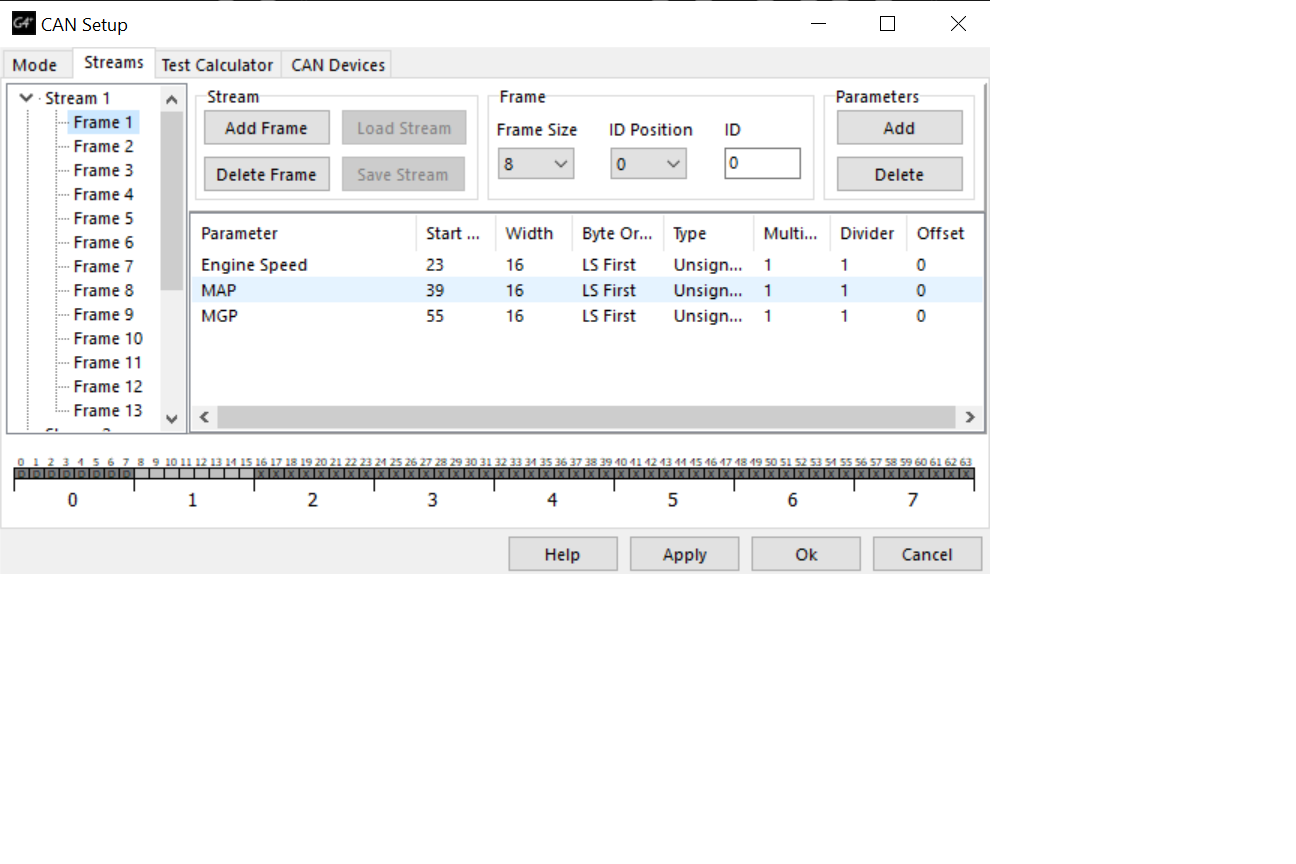
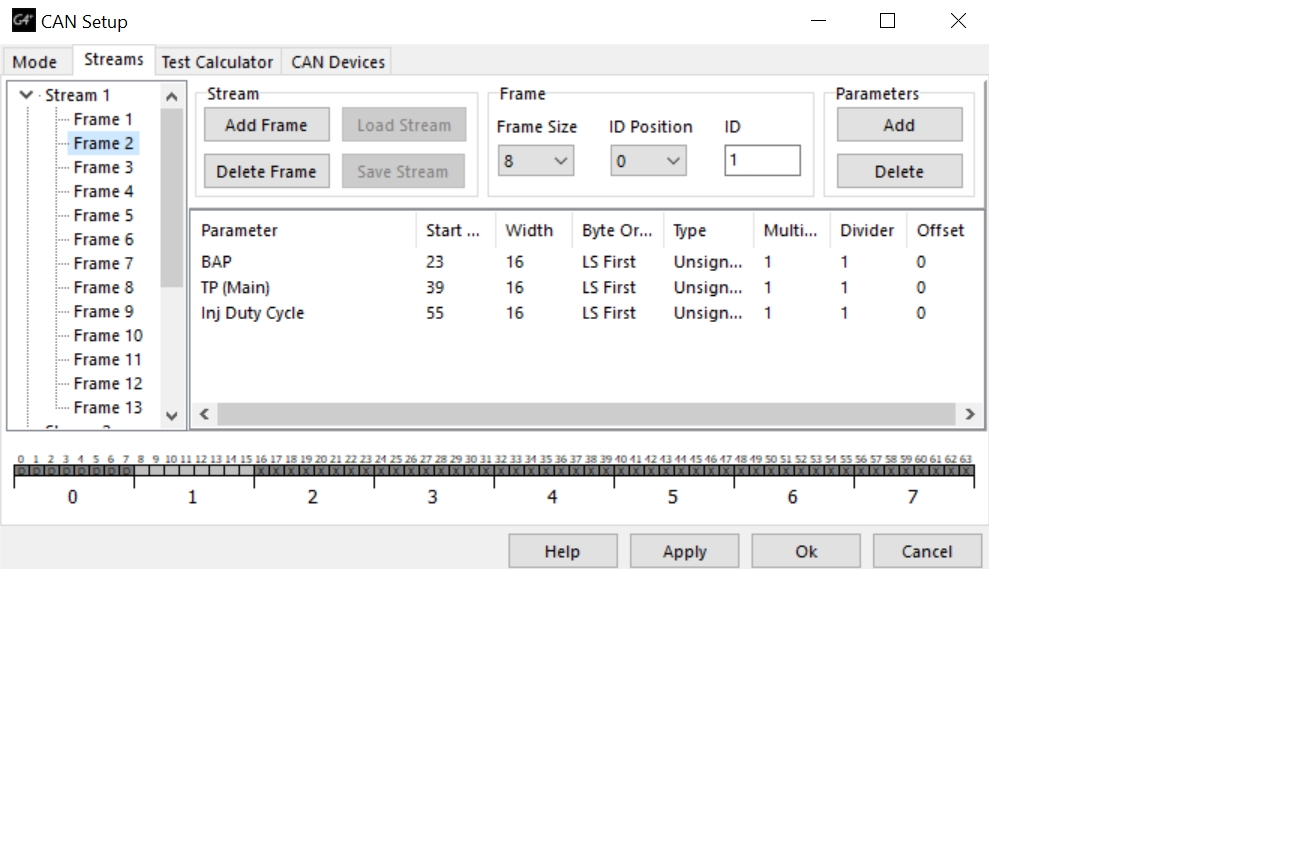
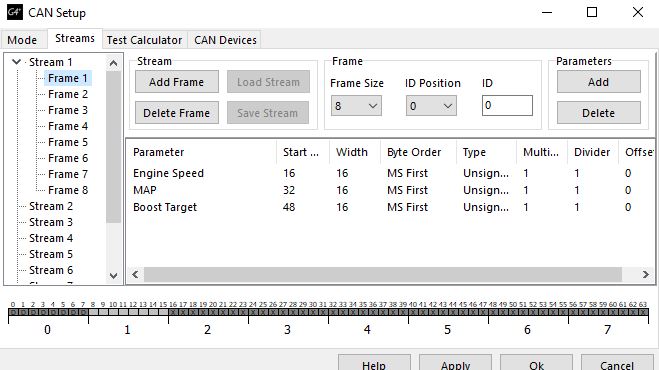
Can you please provide xml for Link G4+ ecu. I’m new to setting up CAN but I’ve managed to find this information on the Link help file and incluced some samples from the ECU CAN setup page.
Is there a specific reason you need Link CAN connection as it is directly supported by RealDash?
I’m using lambda to CAN and egt to CAN which is not support using the USB connection.
Could you provide a link to a source where you got the materials on your attached images? I wan’t to take a closer look before I write the XML, and also would like to use copy paste for parameter names what I cannot do from the image.
The information was sourced from the ecu software help file which can be download from my Google Drive folder. https://drive.google.com/file/d/19DNKmCMfChp0nnrx52dV46KPI4Pkd5BS/view?usp=sharing
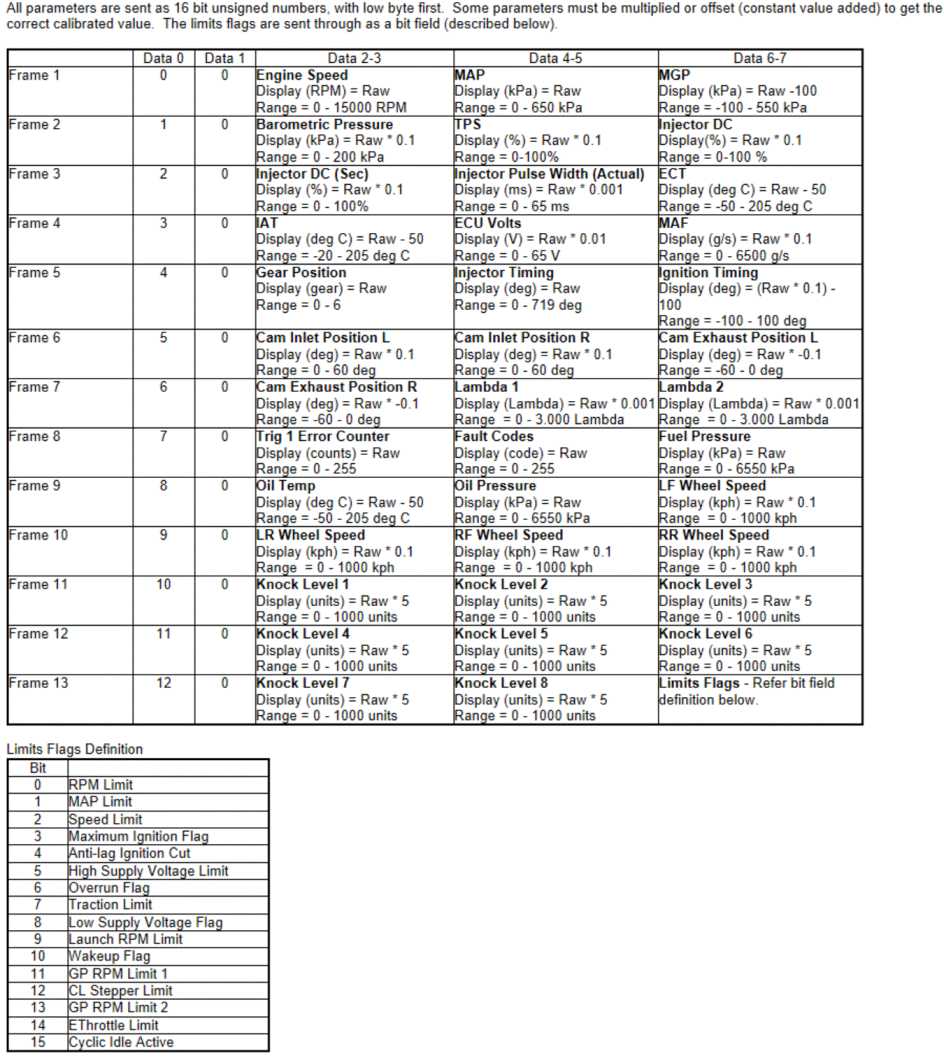
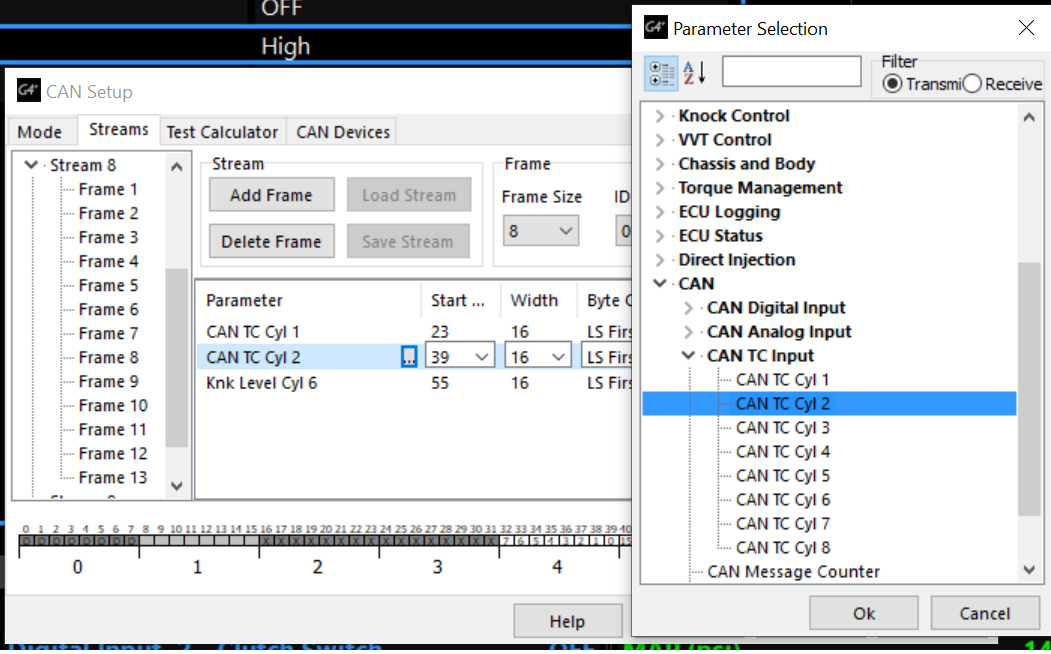
Click on the search tab and enter “Device Specific CAN Information” and then select “Generic Dash”. This is main mode for transmitting all the parameters. I know that CAN Lambda and CAN EGT is not listed but within the software any of the frames can be changed for example Frame 12 which is listed as Knock Level 4, Knock Level 5 & Knock Level 6 can be changed to CAN TC Cyl 1, CAN TC Cyl 2 & CAN TC Cyl 3.
Also search for “Data for CAN” you may find the information helpful.
Thank you for your help.
Hi
Did you have any luck with the information I supplied?
Have been busy with other issues. Will get back to this as soon as I can.
Ok Thank You
Hi
Is it possible you can please do sample of the information I provided and I will try and complete the rest.
Hi! I’m also very interested in this, because with my Link Thunder I can’t find any other way to display the values from the internal wideband. So please make this thing work ![]()
We are working on this with co-operation with Link. They are currently making tests and writing instructions on how to configure the ECU for direct CAN connection with RealDash. We should get something from there soon.
Ok thank you for the update.
I tried to work this out by myself. Can realdash realise CAN frame IDs? So when I say the ID position of the frame is in Byte 0, does realdash recognise this?
For example CAN ID is 1520. Stream 1 Frame 1 has ID 0 (so it’s 1520), Frame 2 ID 1 (so it’s 1521 if I’m getting this right) and so on. Can I make realdash realise that?
Found out how to make it work! Attached you find my xml file and my PCLink CAN settings. From there on, you can swap the parameters you need or just use it, as it is.
Cheers, Toni
p.s. but if someone could tell me how to make it work with the frameID, that would make more things possible ![]()
G4+ Thunder_CAN_realdash.rar (173 KB)
LinkECU_mehrstream _oBase.xml (5.6 KB)
Thanks Toni I will download it and let you know how I get on.
Toni just want to say thank you mate. Your XML file helped me a lot into understanding the layout structure and I now finally have AFR readings and can add any parameter I want.
Cheers, Jason
Cool! I’m super happy I could help you by helping myself aswell ![]()
Any updates here on how to use the FrameID?
Or another question: is it possible to switch something through RealDash? Like Boost or something? So configure a CAN Output from RealDash. Saw this on my buddys Canchecked display.
As you define inputs in XML using the ‘name’ parameter, you can simply change the data of that input in RealDash and the change is written into to CAN bus. Try to create a button that changes your input defined in CAN XML.
Does this refer to the arduino CAN description file?