It runs alright on 64bit RaspiOS (link). Only takes 2 seconds longer to boot. Garage is more finicky than on the 32bit; 2.0.1-1 version.
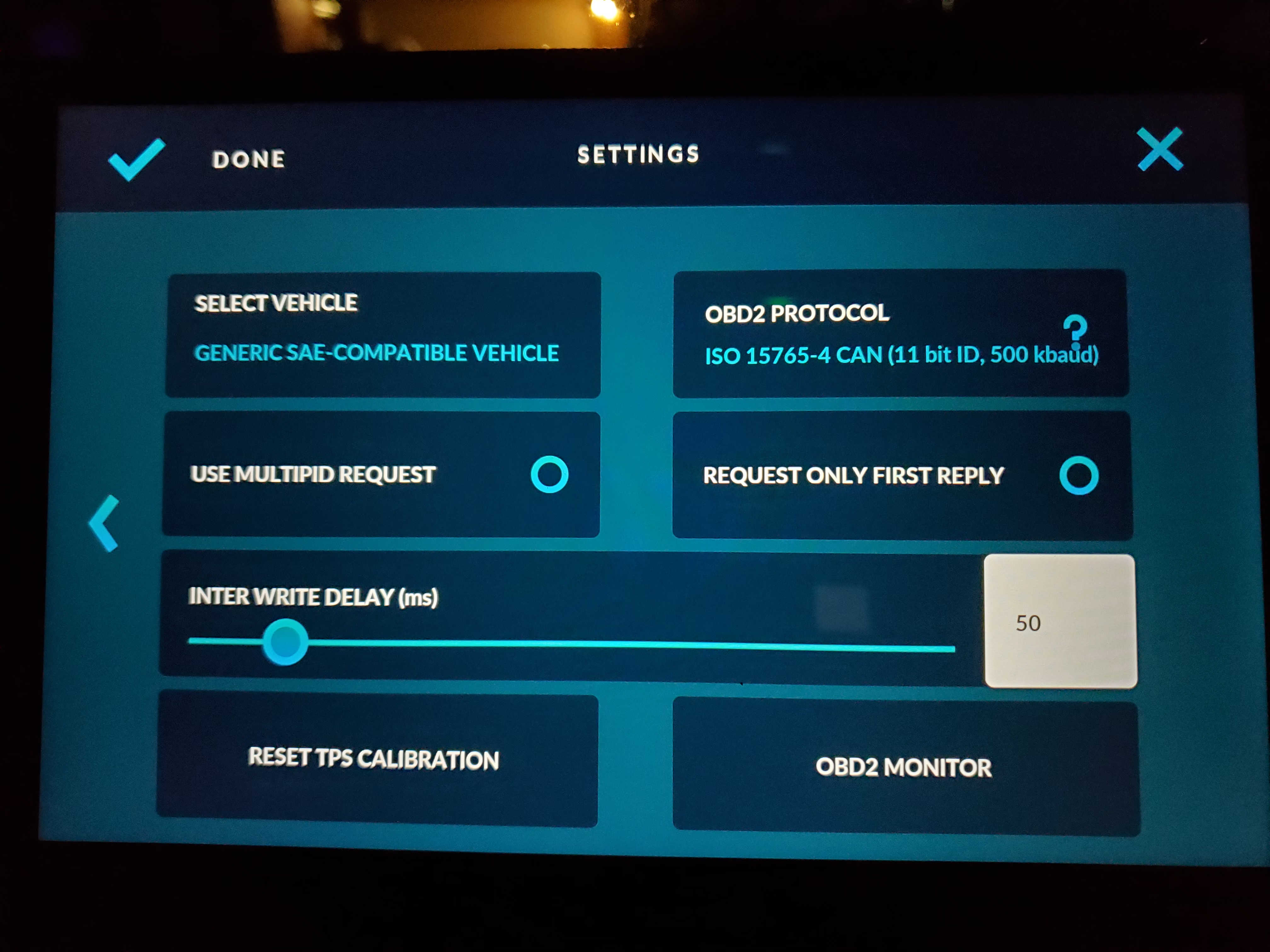
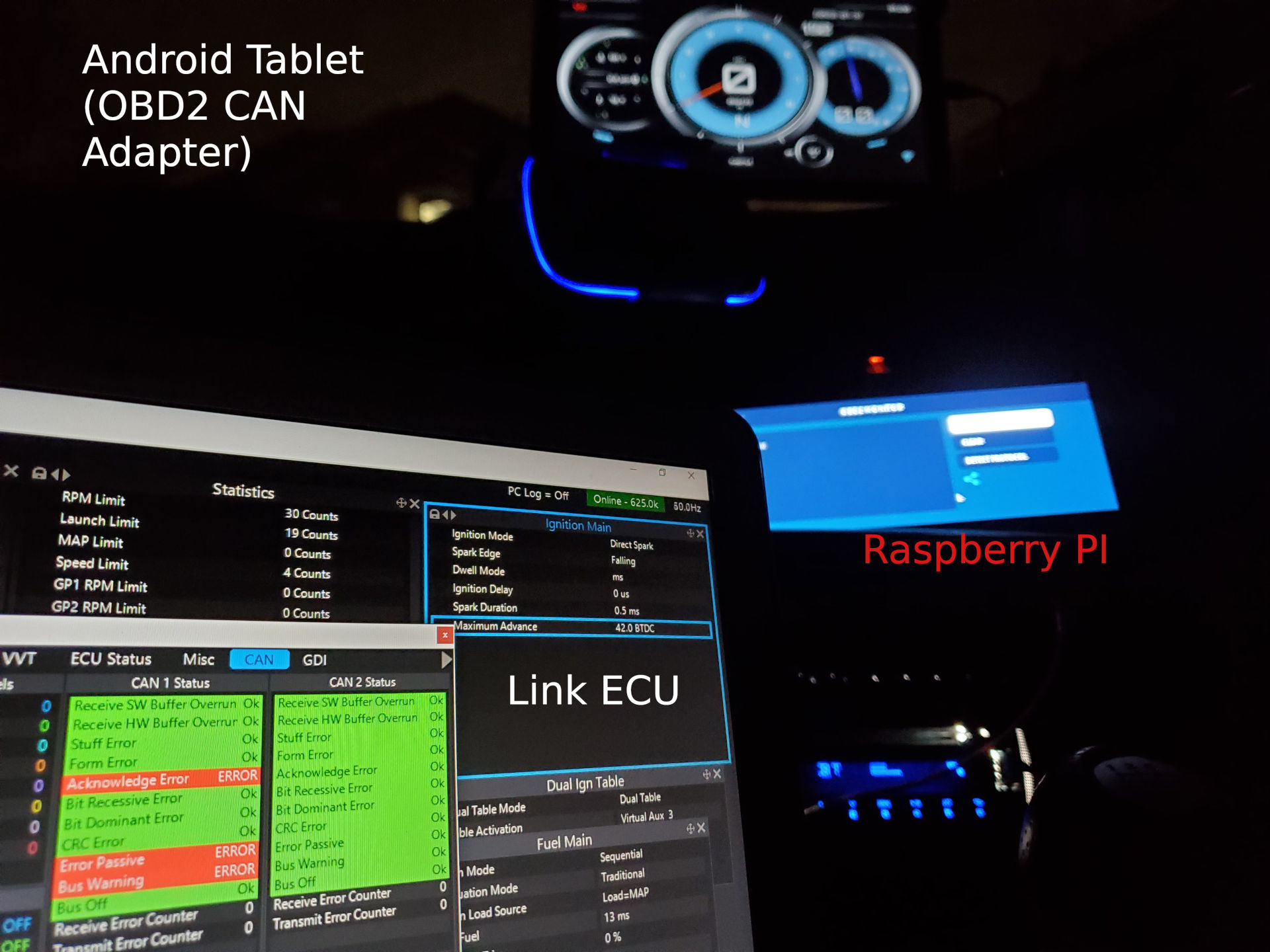
The real issues that I have are with CAN. I know that you said CAN wasn’t working, but I thought Bluetooth CAN was working. This has been an area of contention for a while on my setup. I’m using a LINK Ecu through a OBD2 CAN adapter. It works on my Android tablet (AOSP 12 & Realdash v202). I had it originally working through LINK, but now that doesn’t work with the latest Realdash, so I’m using the OBD2 option).
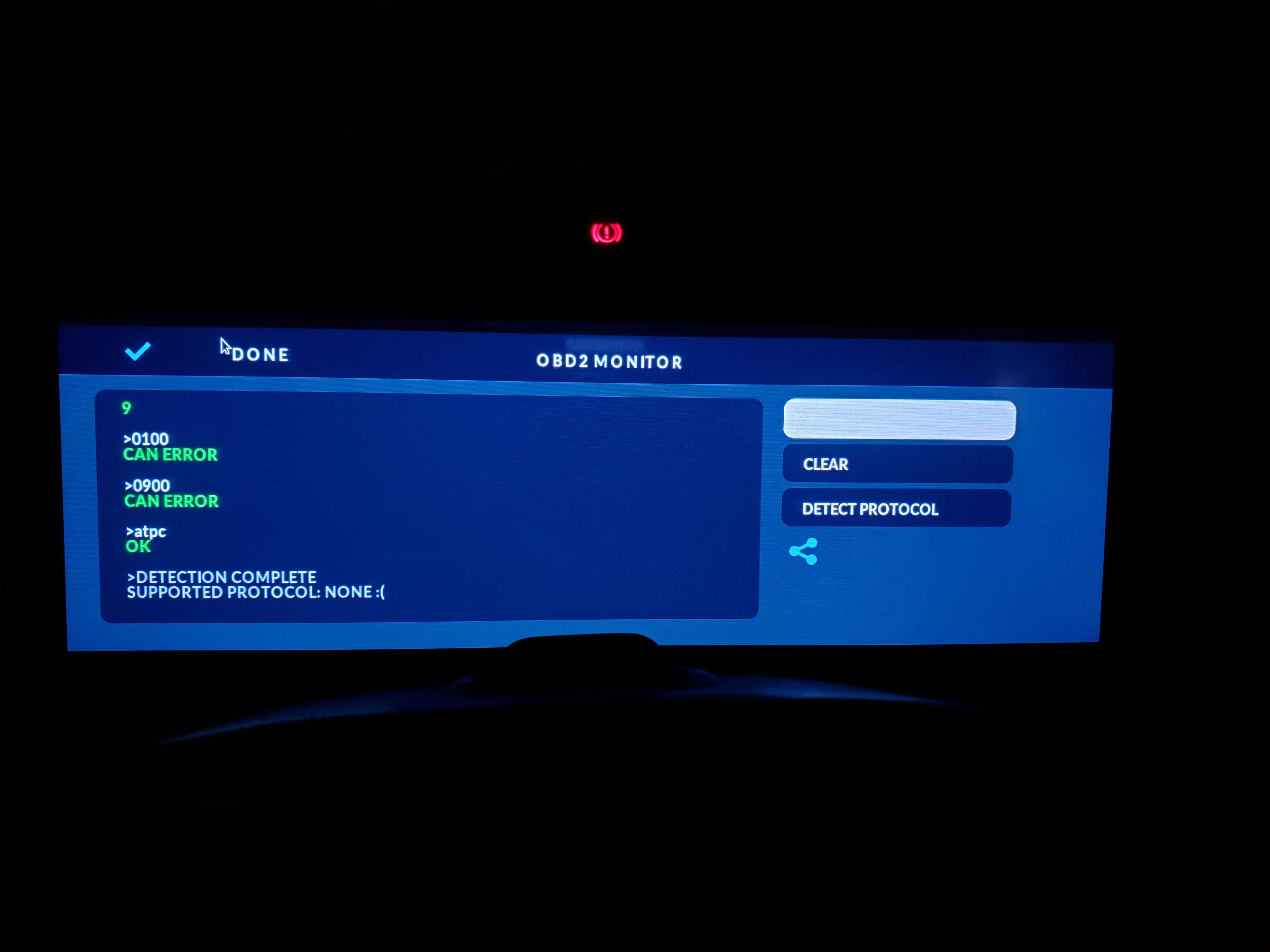
On the Pi with 2.0.1-1 32bit, I have a few CAN options, but the only one that recognizes the adapter shows "SUPPORTED PROTOCOL: NONE .
On the Pi with 2.0.3-1 64bit, no CAN options seem to work
USB wired does work on the 32bit version, but then I can’t tune my car. It’s not an option for this to replace my actual dash.
Would this happen because of driver issues from 32 to 64 bit? I haven’t had a chance yet to do anything to help test the linux version of this yet as family issues. I hope to be able to start doing some testing this week as the design of the cluster bezel should be done soon.
I’m trying this on my khadas vim3 running ubuntu and seeing the following error.
khadas@Khadas:~$ realdash
realdash: /lib/aarch64-linux-gnu/libasound.so.2: no version information available (required by /lib/aarch64-linux-gnu/libsndio.so.7.0)
realdash: /lib/aarch64-linux-gnu/libasound.so.2: no version information available (required by /lib/aarch64-linux-gnu/libsndio.so.7.0)
Segmentation fault
System info…
root@Khadas:/home/khadas# ls -la Downloads/realdash-mrd_2.0.3-1_arm64.deb
-rw-rw-r-- 1 khadas khadas 26075020 Jan 27 21:59 Downloads/realdash-mrd_2.0.3-1_arm64.deb
root@Khadas:/home/khadas# uname -a
Linux Khadas 4.9.241 #8 SMP PREEMPT Sat Jan 8 09:27:25 CST 2022 aarch64 aarch64 aarch64 GNU/Linux
root@Khadas:/home/khadas# lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 20.04.3 LTS
Release: 20.04
Codename: focal
root@Khadas:/home/khadas#
or is the issue more to do with aspect ratio? is 2:1 too wide?
it seems like the lions share of these 5" round displays are billed as 1080x1080 but are actually somewhat smaller as they’re a round stamp out of a square display
Cool looking display set! You’ll know when you test those. The problems with ultrawide displays are mainly on Android and seem to be dependent on driver board, not the display itself.
Next version of RealDash will have new connection type on Linux: ‘SocketCAN’. The SocketCAN is a Linux kernel module that allows communication on CAN bus. In practise, with this connection type RealDash can read/write CAN whenever the installed cantools are able to. Example:
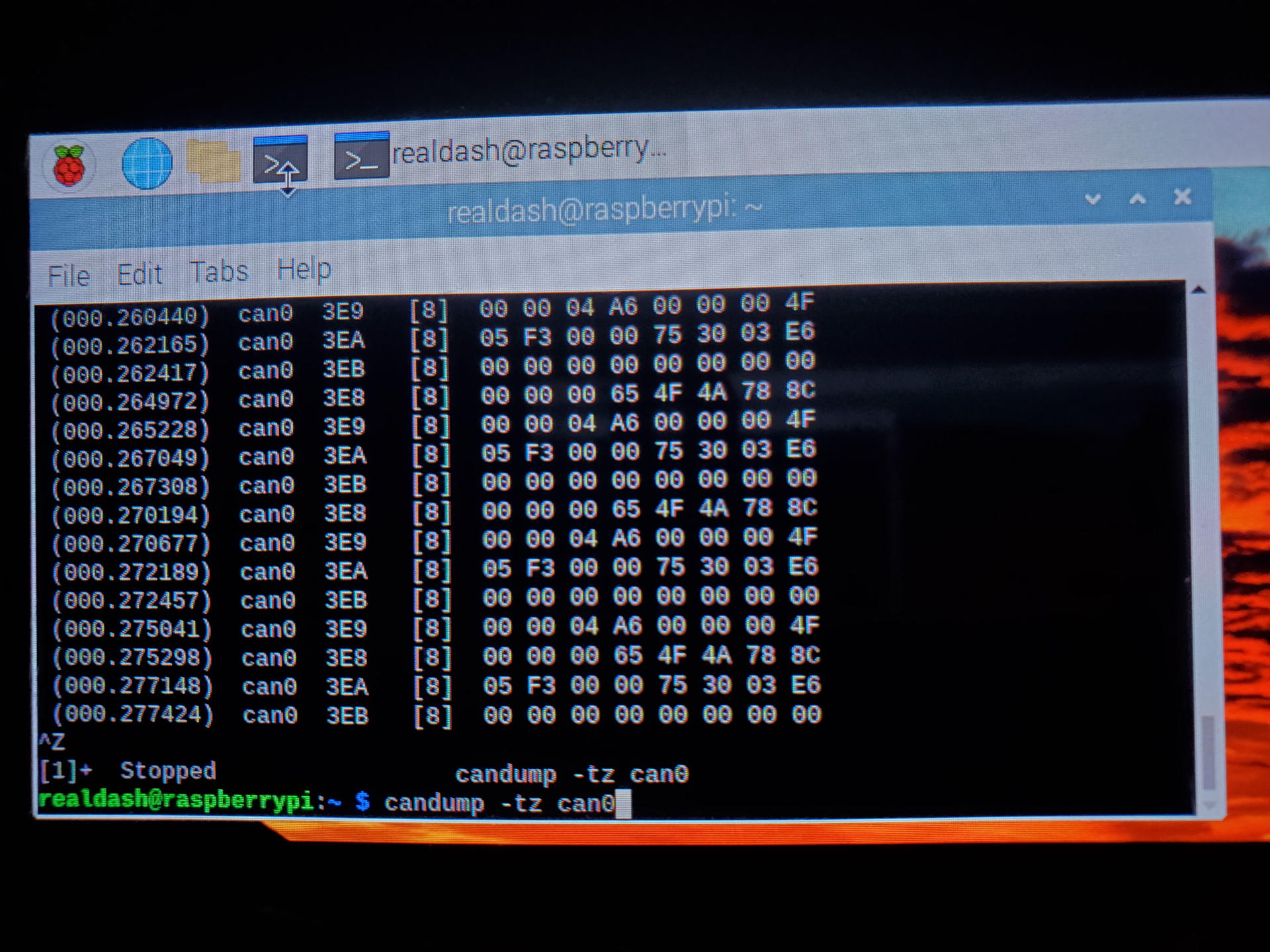
candump can0
Where ‘can0’ is the name of your CAN interface. If you get a stream of CAN data to the terminal, RealDash is able to access it too with SocketCAN connection type.
Can confirm, it’s working
It freaks out with transmit user 1 (which also goes to my ODB Can device), but with Real2Dash it works perfectly.
Edit: Are you looking to do a fully paid for version, similar to the android and windows versions? Something that doesn’t require a subscription and won’t require the internet? Mine boots me out every couple of days and I have to break out the keyboard and hotspot. Your time deserves compensation, I’m totally on board with that, but my setup will not be connected to the internet.
For testing I’m trying to get realdash to turn on an LED when it’s running. I’ve got the LED grounded through a 330 resistor and the positive side of the LED connected to pin 40 of the PI. In the input mapping I have GPIO: Output (pin 40) is set from app started, but it’s not lighting up. What am I doing wrong?
I believe all current PIs have WiFi. Make a hotspot from your phone to have PI online all the time. You get maps, navigation, speed limits etc. at the same time.