First you need to create a channel description file that describes the Syvecs CAN frames. See examples of other ECU XML files here: https://github.com/janimm/RealDash-extras
You can also use SPLeinonen’s DashBox (spleinonen.com) as a converter, or use DIY solution and implement RealDash CAN protocol, Arduino examples are also in GitHub extras project: https://github.com/janimm/RealDash-extras
Does Syvecs have a predefined list of CAN frames they use, or do you have to define them manually by yourself? If they have a predefined set, I can make the XML for that as it will be helpful for other Syvecs users. For custom data, we just do not have resources to do that as it can take a long time.
and if you want an calibration( map ) i can email you one, as you need this to vieuw the software.
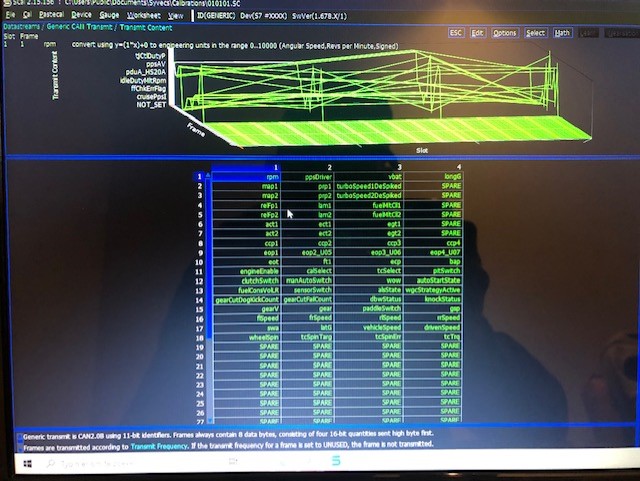
if you open the calibration, you find an long list of functions, theres data streams someware.
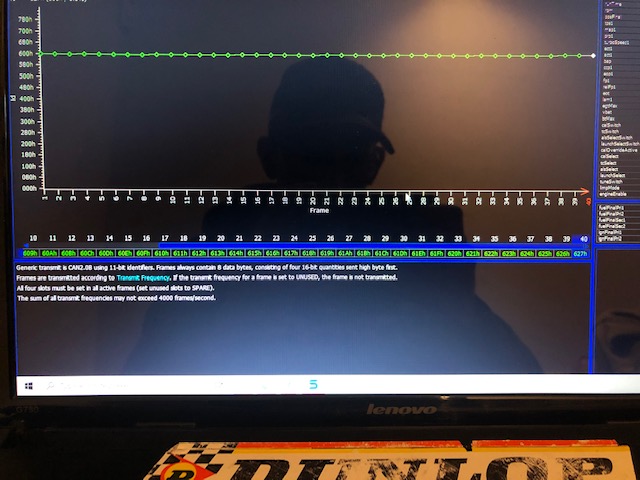
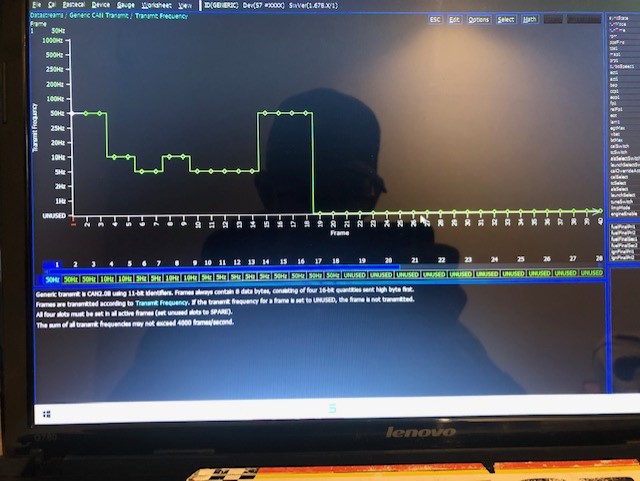
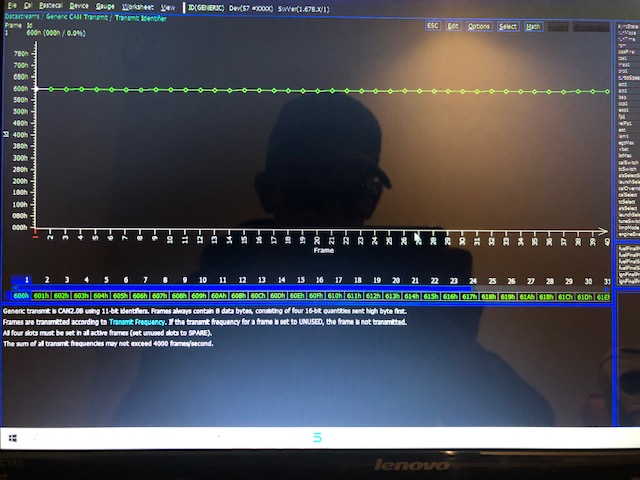
if you open that up and click on generic CAN transmit, and generic CAN receive it wil show the can protocol in detail.
if i can do anything to help or be assistance im more than willing to help.
Send me your SCal file via pm and I will look into making a .xml test file for you to try.
I have made a draft syvecs .xml for testing, however every syvecs cal file can have different CAN transmission data content and addresses - they are fully customisable. There is no single syvecs default as even the default for individual cars (pnp kits) and different ecu’s will have a different default data set for CAN.
Based on your screen shot the resolution is a little too low for my eyesight so I cant make out all the details.
Also, what car is this on? more specifically what is the engine layout? v6, straight 6, 4 etc. is this a pnp kit?
I’ve sent Maarten a test file, hopefully it works out for him.
I suspect there might be some minor issues with units using the default realdash and default syvecs units.
If that’s the only problem it will be easy to fix and I will write a “how to” set up your own .xml file as required for Syvecs users. You will just need to update the .xml to match the CAN frames you want to read.